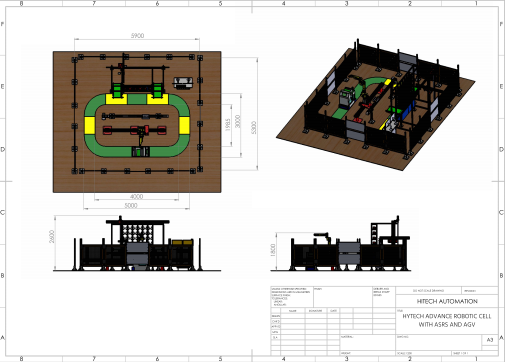
Major Components:
- Automatic Storage and Retrieval System
- Magnetic Strip Guided ‘Automated Guided Vehicle’
- 6 Axes Fanuc Robot mounted on a gantry (Mobile Robot application) with minimum linear travel of 4 meter
- Fanuc Delta Robot
- 2D Vision system with color based sorting, shape based sorting and size based sorting
- Transfer conveyor (Flex Belt) with minimum travel of 3 meter
- Central Control Unit with S7 1500 PLC, KTP 900 HMI, Siemens Industrial SCADA (WinCC Advance)
Barcode Printer and Scanner with SCADA Connectivity
Advantages of Integrated System:
- Automatic Storage and Retrieval System:
- Complete system can be operated in individual as well as integrated mode.
- User can program each cell as well as each transfer station through PLC and HMI.
- User can design the PLC ladder as well as SCADA based program for ASRS operation
- Barcode Scanning process and relevant program selection through PLC can be achieved
- Magnetic Strip Guided AGV:
- AGV can be operated in individual as well as integrated mode.
- User can design a path with a very easy to use magnetic strip which can be directly pasted on the floor without any preparation
- User can design as path as well as achieve Wifi based communication with Central PLC
- User can communicate necessary input as well as output signals with Central PLC as well as SCADA
- Control of Magnetic strip guided vehicle through Wifi with Central PLC and SCADA
- 6 Axes Fanuc Robot mounted on a gantry (Mobile Robot application) with minimum linear travel of 4 meter
- This mobile robot can be operated in individual as well as integrated mode.
- This Robot can be termed as a mobile robot with 7 axes
- User can demonstrate basic applications of mobile robot
- Exposure to basic interlocks as well as basic safety parameters required for mobile robot application
- User can understand as well as demonstrate the difference in application as well as safety measures of mobile robot in comparison with standalone robot
- Fanuc Delta Robot
- Fanuc Delta Robot can be operated in individual as well as integrated mode.
- User can understand and demonstrate the use as well as advantages of Delta robot as compared with articulated robot
- Various features can be demonstrated as well as utilized
- Delta robot can be operated in collaboration with vision sensing, PLC as well as SCADA
- Use and integration of delta robot with vision sensor as well as PLC is in itself is a learning experience
- 2D Vision system with color based sorting, shape based sorting and size based sorting
- One of the best vision system available in the market with direct compatibility with Fanuc robots
- User can operate this system in collaboration with Robot as well as PLC and SCADA
- User can carry out teaching based on shape, size as well as colour.
- Transfer conveyor (Flex Belt) with minimum travel of 3 meter
- Flex belt conveyor which operates with AC Induction motor as well as VFD.
- Conveyor can be operated as well as integrated with PLC and SCADA
- Conveyor can be operated in individual mode as well as integrated mode
- Central Control Unit with S7 1500 PLC, KTP 900 HMI, Siemens Industrial SCADA (WinCC Advance)
- Complete system is integrated through CCU
- Can be used for PLC training as well
- Provided with Siemens HMI which can be used for operation
- User can design as well as operate the HMI based on operator based cycles
Process:
- Raw jobs will be loaded in AGV from ASRS. From Barcode scanner, nature of jobs (Shape based sorting / color based sorting / size based sorting) will be communicated with CCU and relevant program will be automatically selected.
- AGV will move to the conveyor station.
- 6 Axes Robot (Existing Robo) will be transferred to the conveyor loading station on gantry (Mobile robo)
- Raw job pallet will be loaded on the conveyor by mobile robot. AGV will then move to the conveyor unloading position.
- Once the pallet is loaded on conveyor, conveyor will move in forward direction to process the jobs through Vision inspection station.
- Based on the vision inspection input, jobs will be sorted by the Fanuc Delta robot. The sorted jobs in the finished pallet will then move on the conveyor to reach conveyor unloading position.
- Mobile robo will also reach conveyor unloading position and unload the finished pallet on the AGV.
- AGV will the move to the ASRS station and the finished pallet will then be stored back into the ASRS.